
Robot tal-Ittimbrar b'4 Assi għall-Magna tal-Istampa



Introduzzjoni tal-Prodott
Fid-dawl tad-domanda attwali għall-aġġornament u t-trasformazzjoni tal-industrija tal-ittimbrar, ġie ddisinjat u żviluppat robot tal-immaniġġjar tal-ittimbrar b'4 assi b'flessibbiltà għolja u kontroll sempliċi.
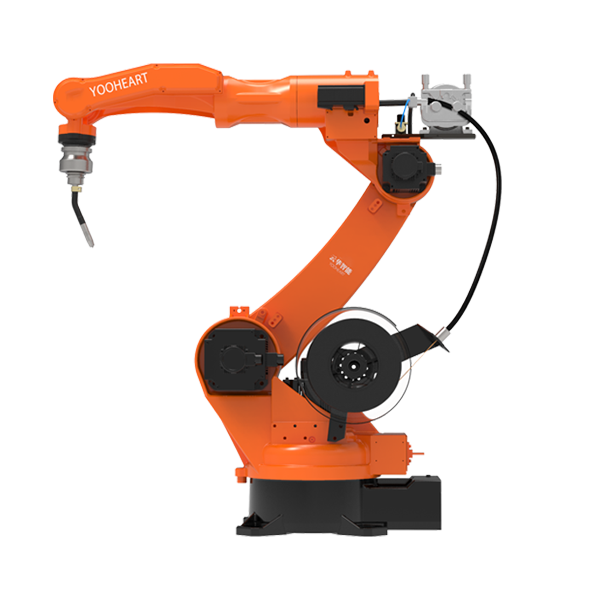
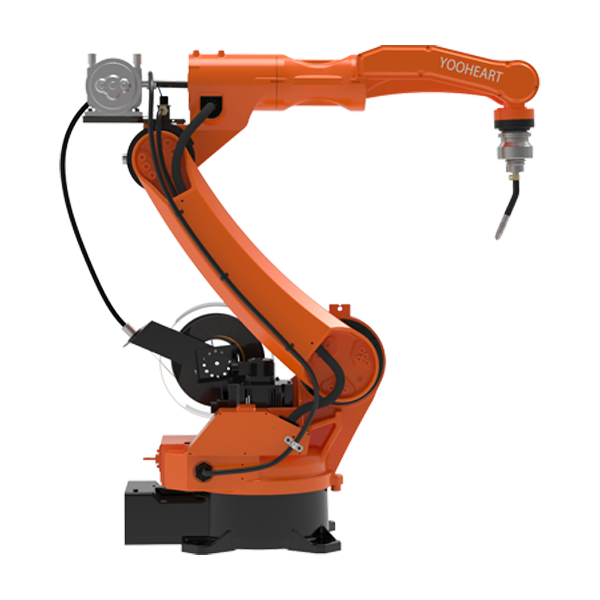
Robot tal-ittimbrar b'erba' assi jadotta disinn b'erba' assi, forma kompatta, daqs żgħir, piż ħafif, użat ħafna fl-iwweldjar bl-ark tal-argon, palletizzazzjoni, immaniġġjar, ittimbrar u oqsma oħra, jista' jlesti immaniġġjar stabbli, iwweldjar preċiż. Il-manipulatur tal-ippanċjar b'erba' assi jista' jwettaq operazzjoni ta' ittimbrar b'mod flessibbli fi spazju żgħir, u huwa sempliċi u konvenjenti biex jiġi installat u d-debugging.
Partijiet Ewlenin
Il-Partijiet Kollha ta' Marka Ċiniża ta' Kwalità Għolja
Mutur Servo
Il-marka tas-servo motor hija Ruking, marka Ċiniża bil-vantaġġi ta' reazzjoni rapida, proporzjon kbir ta' torque għall-inerzja tat-torque tal-bidu, eċċ. Jista' jiflaħ kundizzjonijiet ta' tħaddim ħorox li jwettaq operazzjoni ta' aċċelerazzjoni u deċelerazzjoni 'l quddiem u lura frekwenti ħafna u jista' jiflaħ tagħbija żejda diversi drabi fi żmien qasir.
SISTEMA TA' KONTROLL LNC
Ir-robot Yooheart jadotta programmazzjoni tat-tagħlim. Huwa sempliċi u konvenjenti u flessibbli fl-operazzjoni. Ir-robot Yooheart jappoġġja wkoll programmazzjoni mill-bogħod, li tista' tiġi applikata f'varjetajiet ta' programmi kumplessi.
ĠISEM TAR-ROBOT
Il-korp jadotta l-proċess tal-ikkastjar bil-forom, billi juża l-kavità tal-moffa biex japplika pressjoni għolja għall-formazzjoni tal-metall li jdub, il-korp jifforma densità għolja, riġidità qawwija, il-piż tiegħu stess huwa eħfef.
Wirja tad-Dettalji
Preċiżjoni Għolja
Rispons ta' azzjoni rapida
U l-livell huwa ewlieni
fil-pajjiż
Sempliċi fl-istruttura
Faċli biex tinżamm
Aktar kosteffettiv
Veloċità għolja u stabbiltà
Mogħdija preċiża
Soluzzjonijiet Perfetti għall-Ittimbrar
Parametru tar-Robot
| Proġett | Speċifikazzjoni | Proġett | Speċifikazzjoni | Assi | Firxa ta' moviment | Veloċità massima | Dijametru vojt |
| Assi | 4 | Temperatura | 0℃-45℃ | J1 | ±170º | 190º/sekonda | —— |
| Kapaċità | 3.7KVA | Umdità | 20-80% RH (Mingħajr umdità) | J2 | +10º~+125º | 120º/sekonda | —— |
| Piż | 170KG | Vibrazzjoni | Taħt 4.9M/S² | J3 | +10º~-95º | 120º/sekonda | —— |
| Paga massima | 10KG | Oħrajn | L-ebda gassijiet u likwidi fjammabbli u korrużivi, żomm 'il bogħod minn sorsi ta' storbju elettriku | J4 | ±360º | 200º/sekonda | —— |
| Firxa massima tax-xogħol | 140ĊM | Ripetibbiltà | ±0.08mm | Livell tal-IP | IP65 | Installazzjoni | Art |
Applikazzjoni tar-Robot
Tagħbija u ħatt ta' prodott ta' estrużjoni sħuna
Dan il-proġett huwa prinċipalment għall-iffurmar tal-ittimbrar tar-ram. Il-proċess tal-ippanċjar aħmar huwa proċess ta' estrużjoni bis-sħana. Matul l-ippanċjar aħmar, il-materjal tal-metall jissaħħan għal ċerta temperatura u jitqiegħed fil-moffa msaħħan minn qabel. Wara l-moviment reċiproku ta' darba tal-għodda tal-magna tal-pressjoni, il-materjal tal-metall jiġi deformat bil-plastik biex jinkisbu d-daqs, il-forma u l-proprjetajiet mekkaniċi tajbin meħtieġa tal-partijiet tal-ittimbrar. Il-klijent jadotta robot tal-immaniġġjar ta' 4 assi Yooheart biex jgħabbi u jħott il-biċċa tax-xogħol tal-metall tal-ippanċjar aħmar.
Ħarsa Ġenerali lejn is-Soluzzjoni ta' Integrazzjoni
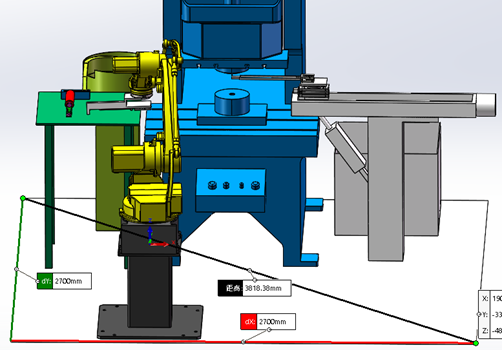
Il-proġett jikkonsisti minn pressa tat-titqib, robot Yunhua b'4 assi ta' 10kg, għodda ta' pożizzjonament sekondarju, apparat li jillimita l-kombinazzjoni taċ-ċilindri, eċċ. Id-dejta magħrufa bħall-ħin tat-tbatija, it-tagħbija nominali u l-kundizzjoni tax-xogħol huma kollha fil-medda tal-parametri nominali ta' HY1010B-140.


Ħarsa ġenerali lejn il-proċess tal-produzzjoni
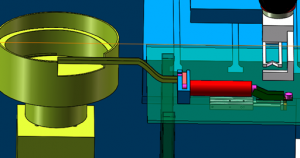
Tmigħ manwali għall-parank▶ tmigħ tal-pjanċa tal-vibrazzjoni▶ Pożizzjonament tal-apparat tat-tmigħ qabel it-tisħin▶ tisħin ta' tubu b'kurrent eddy▶ pożizzjonament ta' apparat ta' pożizzjonament sekondarju▶ ikklampjar tar-robot▶ ippressar tal-punch press▶ ħatt tal-apparat tat-tmigħ taċ-ċilindru
Sommarju tal-azzjoni tal-apparat tat-tmigħ u l-pożizzjonament
Għatti l-pjanċa tal-vibrazzjoni manwalment ▶ Il-pjanċa tal-vibrazzjoni hija l-provvista tal-materjal għat-tubu tat-tisħin tal-kurrent eddy ▶ L-għodda sekondarja tal-pożizzjonament hija l-pożizzjonament tal-morsa tar-robot
Ħarsa ġenerali lejn l-azzjoni tal-apparat tal-ikklampjar
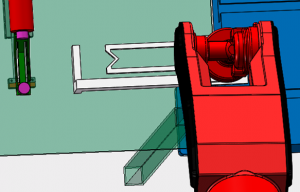
Ir-robot se jwaħħal materjal tar-ram pożizzjonat ▶ għall-iffurmar tal-punch
Servizz ta' Wara l-Bejgħ
Għandna servizz ta' wara perfett biex ngħinuk titgħallem l-operazzjoni anke jekk qatt ma użajt robots industrijali u nsolvu problemi matul il-ħin tal-użu tiegħek.
L-ewwel, se nipprovdu l-manwali relatati biex jgħinuk tifhem xi informazzjoni dwar ir-robot.
It-tieni, se nipprovdu serje ta’ vidjows ta’ tagħlim. Tista’ ssegwi dawn il-vidjows pass pass mill-wajers, programmazzjoni sempliċi sat-tlestija ta’ programmi kumplessi. Huwa l-aktar mod effiċjenti biex ngħinuk fiċ-ċirkostanzi tal-covid.
Fl-aħħar iżda mhux l-inqas, se nipprovdu servizz online b'aktar minn 20 tekniku. Jekk għandek xi mistoqsijiet, tista' tikkuntattjana fi kwalunkwe ħin u aħna ngħinuk minnufih.


RFQ
M. Dan huwa sikur għall-ħaddiema?
A. żgur, wieħed mill-vantaġġi tal-użu ta' robot għall-pick and place huwa l-protezzjoni tal-ħaddiema minn korrimenti. Ħaddiem wieħed jista' jimmaniġġja 5~6 unitajiet ta' magna CNC.
M. x'tip ta' prodott jista' juża robot tat-tagħbija u l-ħatt?
A. Kull loader tal-magna robotika jista' jkun mgħammar b'għodda xierqa tat-tarf tad-driegħ li hija kompatibbli mal-magna u l-prodott tiegħek. Huma estremament preċiżi u għandhom ukoll id-destrezza biex jimmaniġġjaw il-parti b'attenzjoni.
M. Tarf wieħed biss tal-għodda tad-driegħ jista' jintuża għat-tagħbija u l-ħatt tar-robot?
A. Id-driegħ tar-robot industrijali jista' jimmodifika l-programm u l-morsa tal-gripper, bidliet rapidi fil-magażinaġġ intelliġenti, veloċità ta' debugging, telimina l-ħtieġa għall-impjegati iżda wkoll għall-ħin tat-taħriġ, jista' jitqiegħed malajr fil-produzzjoni.
M. Hemm xi mertu ieħor tat-tagħbija u l-ħatt tar-robot?
A. Ittejjeb il-kwalità tad-dehra tal-biċċa tax-xogħol: linji ta' produzzjoni awtomatizzati bir-robot, mit-tmigħ, l-ikklampjar, it-tqattigħ kompletament mir-robots, sat-tnaqqis tal-konnessjonijiet intermedji, il-kwalità tal-parti titjieb ħafna, speċjalment wiċċ aktar sabiħ.
Q. Tista' tipprovdi soluzzjonijiet sħaħ għat-tagħbija u l-ħatt tar-robot?
A. ċertament, nistgħu nagħmlu dan flimkien man-negozjant tagħna.
Kategoriji ta' prodotti
-

YH1006A-175: Robot tal-Iwweldjar b'6 Assi għal Preċiżjoni Għolja...
-
Robot tal-iwweldjar Mig b'6 assi għal rack tal-ħażna
-

Stazzjon tax-Xogħol tal-Iwweldjar bl-Ark Robotiku b'7 Assi
-

Palletizzatur Robotiku ta' Tagħbija ta' 6 DOF 165kg
-
Robot tal-iwweldjar Tig b'alimentatur tal-wajer
-

Robot tal-iwweldjar bl-ark tal-partijiet tal-karozzi



