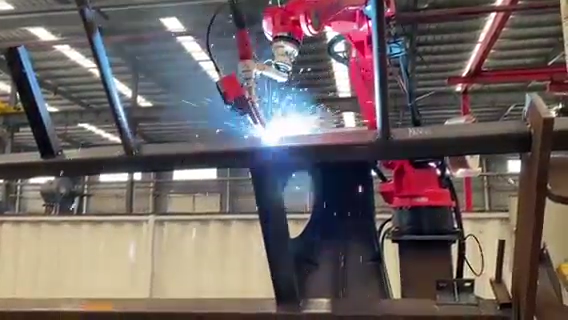
Iwweldjar tal-bażi tal-karozza tat-tank tas-siment Orbita tad-dinja b'seba' assi Rotazzjoni ta' tmien assi bl-iwweldjar bil-lejżer
-Il-pożizzjoni tal-biċċa tax-xogħol tvarja ħafna
-Teżisti devjazzjoni fil-konnessjoni tal-biċċa tax-xogħol
-Preċiżjoni għolja tal-iwweldjar hija meħtieġa
-Ambjent ħażin tal-iwweldjar u duħħan
F'dan il-każ, ir-robot intelliġenti Yooheart HY1006A-145 jintuża għall-iwweldjar b'sistema ta' traċċar tal-ħjata tal-iwweldjar bil-lejżer, li għandha flessibilità, stabbiltà u affidabbiltà għolja.
Qabel kull iwweldjar, it-tagħmir l-ewwel jiskennja u jirreġistra l-koordinati tal-ħjata tal-iwweldjar permezz tal-lokalizzazzjoni tal-ħjata tal-iwweldjar, u mbagħad jikkalkula l-ispostament tal-koordinati mill-algoritmu intern u jpoġġi l-parametri tal-koordinati ta' referenza fil-ħin attwali biex jikkoreġi d-devjazzjoni attwali fil-ħin, sabiex jiżgura s-siġillar u l-integrità tal-prodott wara l-iwweldjar.
Metodu ta' "intersezzjoni b'erba' punti"

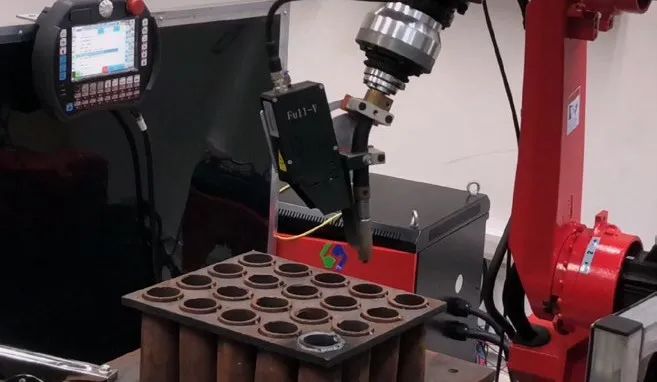
Sistema ta' traċċar tal-ħjata bil-lejżer
Soluzzjoni tal-pjanċa korrugata

Soluzzjoni awtomatika għall-iwweldjar bil-plagg b'toqob tondi

Soluzzjoni ta' ħjata ċirkolari

Soluzzjonijiet ta' tubi
Ħin tal-posta: 09 ta' April 2022



